
Why Autonomous Valet Parking, not robo-taxis, will lead the adoption in self-driving technology
Looking back on 2018, the press have reported it to be the year when the hype around self-driving “came crashing down” with the first driverless fatality in March 2018. The first driverless taxi service was rolled out but it didn’t quite have the impact that the industry was expecting.
Research on self-driving cars has been continuing for more than 30 years, starting with the pioneering work by Ernst Dickmanns on the PROMETHEUS project. A lot of work has taken place since then and is still ongoing, but the question remains: why has the problem of self-driving still not been solved in 30 years?
In a sense, the problem has been solved and autonomous driving is already here. Heathrow pods, Greenwich pods, Easymile, May Mobility are live now, and many others are already in production. What sets these simpler systems apart from the systems being developed by Cruise, Argo, Aptiv, Waymo, Uber, Aurora, Lyft, FiveAI and others, is that the environments into which they are deployed are constrained in some way.
The biggest challenge faced by the developers of general purpose self-driving technology is the requirement to handle complex environments with unpredictable interactions. Waymo’s director of engineering recently summarised the challenge by saying that the final 10% of technology development is requiring 10x the effort required for the first 90%. Where the environment is simpler or constrained, then self-driving technology reduces to that of autonomous mobile robots like the kiva.
A more realistic approach to deploying self-driving is therefore needed. The two major places where self-driving car technology are likely to be deployed are on motorways – constrained environments with very strict rules, limitations on cyclists and pedestrians – and low speed restricted environments like retirement villages and car parks.
Autonomous Valet Parking (AVP)
Parking is one of the most important challenges for a traveller, with a parking pain point experienced on 12% of UK journeys (19% in London); the average driver spends 6.45 mins looking for a parking space during each journey. With nearly 1 in 5 journeys already experiencing problem finding a space, AVP represents a way of solving not only the current parking pain point, but also improving the overall parking experience for the other 81% of drivers. BCG’s 2015 report showed that 67% of drivers are interested in “capabilities such as automated searching for parking spots and autonomous valet parking”. Bosch’s 2017 study found that two thirds of consumers want an automated parking feature.
{kind=link}

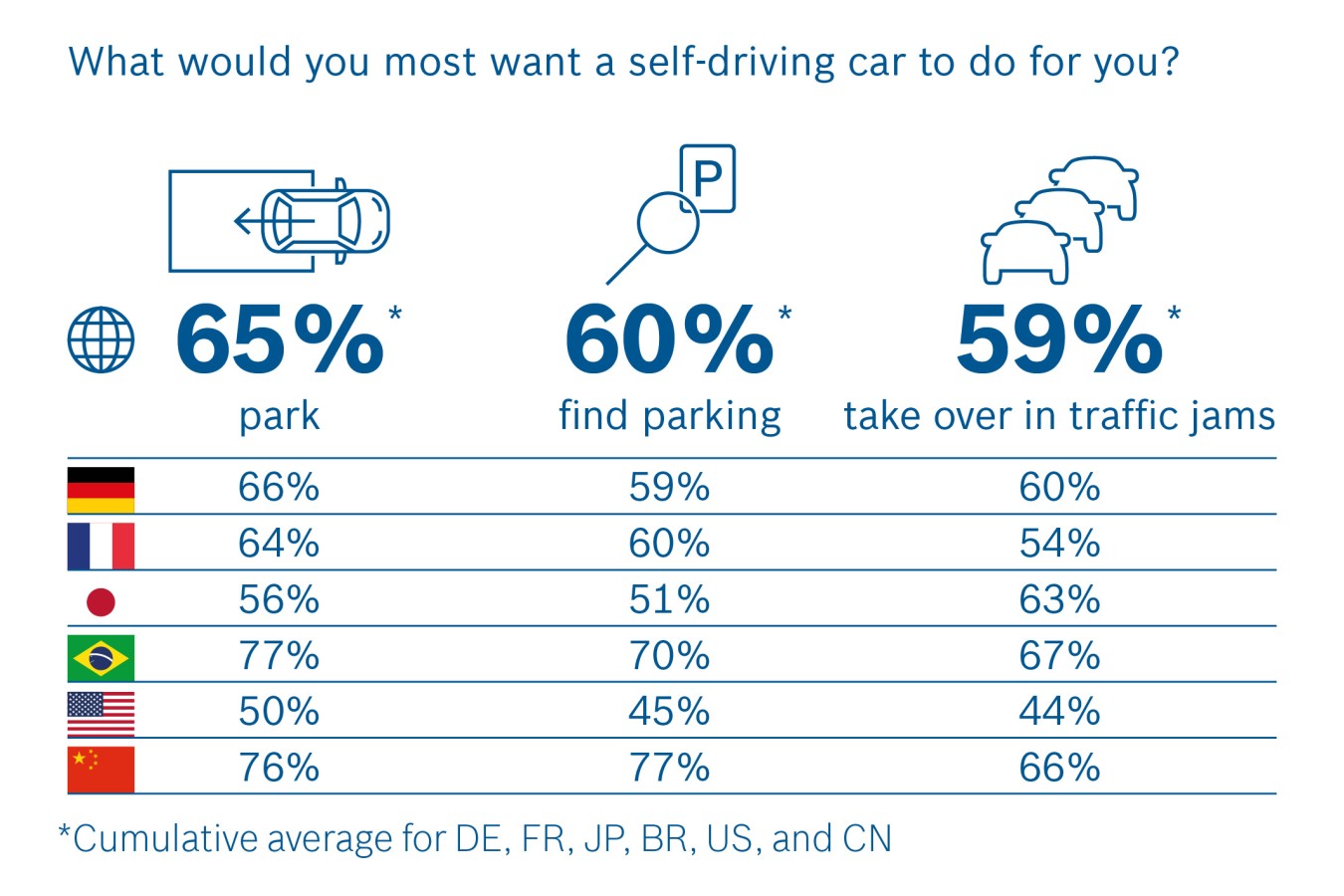
A study by Allensbach in 2016 asking the question “When would you want a driver assistance feature to take over for you?” overwhelmingly showed parking as the most desirable feature.

When German consumers were asked by Bitkom in 2016 when they would be willing to hand over control to the vehicle, the answer similarly was for parking.

The idea of Autonomous Valet Parking is to mimic the Valet function available in selected car parks. After driving to a suitable drop-off location at or near the entrance of the car park, and similar to handing the keys to a valet, the driver presses the “PARK” button on a specially designed app. The car then drives off under autonomous control and finds a suitable place to park. When the driver wants the vehicle back, they will press “SUMMON” and the vehicle will navigate to the pick-up zone.

The Society of Automotive Engineers (SAE) classifies this as a Level 4 feature, in that it provides total automation under specific circumstances.

Based on publicly available information, almost all premium OEMs (Daimler, Audi, JLR, VW, BMW) are working on AVP pilot projects . The reason this feature is so desirable is that it:
- Improves the parking experience by allowing drivers to be dropped off at a convenient location (e.g. at the entrance of the car park closest to the desired location such as shops or food court), avoiding the inconvenience and stress of having to find a parking space.
- Utilises parking spaces more efficiently by tighter/double parking of autonomous cars, and optimally distributing these vehicles within the available parking real estate.
- Avoids unnecessary congestion and pollution through real-time dissemination of parking space availability to the connected autonomous cars.
In addition to the economic benefits, there are clear social and environmental benefits. Driving around looking for parking causes stress and frustration, costs, wasted time, missed appointments, accidents and congestion, noise pollution and CO2 emissions. IBM’s parking survey found that in addition to the typical traffic congestion caused by daily commutes and gridlock from construction and accidents, it is estimated that over 30 percent of traffic in a city is caused by drivers searching for a parking space. By reducing the need to circle looking for a space, AVP has the potential to significantly reduce unnecessary congestion and pollution.
With space at a premium in busy city centres, vehicles equipped with AVP technology could make use of the less desirable spaces that are further from the entrance, freeing up parking spaces closer to a desired destination for those without the technology.
In addition to the economic, social and environmental benefits to AVP, there are also some technical reasons why it is a good candidate feature for large scale public rollout.
1) low speeds mean much lower risk of damage to people, cars and infrastructure.
2) a constrained environment means that the complexity of interactions with other actors has the potential to be significantly reduced.
3) the cost of the required sensor suite and hardware platforms is lower because of the reduced risk and lower speeds.

Conclusion
This consortium’s key objective is to identify obstacles to the full deployment of AVP through the development of a technology demonstrator. It aims to achieve this goal by
- Developing automotive-grade indoor parking maps, required for autonomous vehicles to localise and navigate within a multi-storey car park.
- Developing the associated localisation algorithms – targeting a minimal sensor set of cameras, ultrasonic sensors and inertial measurement units – that make best use of these maps.
- Demonstrating this self-parking technology in a variety of car parks.
- Developing the safety case and preparing for in-car-park trials.
- Engaging with stakeholders to evaluate perceptions around AVP technology.
Autonomous Valet Parking is a low cost, low risk and high reward feature that consumers want. It makes sense then to expect that this feature will be the first fully autonomous feature (at level 4 or 5) available to the general public. Through Parkopedia’s autonomous valet parking project, we are actively working to make that desire a reality.
Recent Comments