
One of the key objectives of this Autonomous Valet Parking project is to demonstrate our autonomous vehicle parking itself in a covered car park. The Transport Systems Catapult is responsible for the safety work package which ensures that all activities undertaken during the project are done in a systematic and safe manner. One of the important deliverables to ensure safety is the Risk Assessment and Method Statement (RAMS).
The RAMS document generally includes:
1. An overview of the project and key objectives to provide the reader with a background of the project
2. The activity being assessed, including:
- Roles and responsibilities
- Limits of the operation and trial details (route planned, scenarios, vehicle specifications, time of day, limits, weather, specifications)
- Legal considerations such as vehicle insurance and laws
- Emergency procedures (eg. vehicle breaking down, network error, sensor malfunction, accident)
- Training achieved (eg. driver training on the StreetDrone.ONE vehicle, taking over manually)
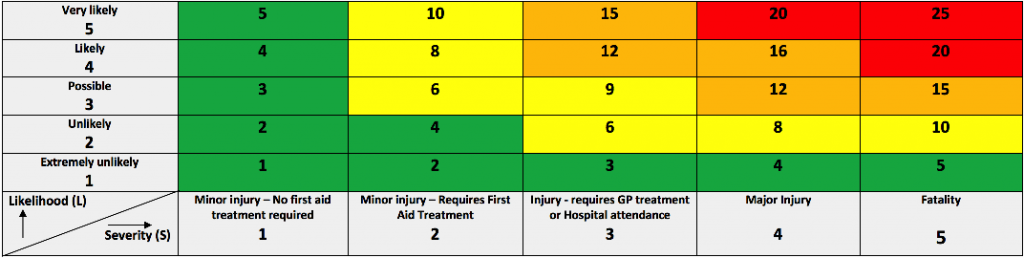
3. A risk assessment listing hazards, consequences, mitigation methods and detailing who might be harmed. Following the ISO 26262 standard, a hazard analysis and risk assessment is required in order to determine the criticality of a system.
The risk analysis is focused on:
- Risks related to the ongoing operation of the vehicle
- Risks related to the operation of external factors that affect current operation
- Risks arising from the new equipment that may affect the safety of the vehicle or other

The method statement part describes in a logical sequence how a task will be carried out in a safe manner. It includes all the risks identified and the measures needed to control those risks.
The purpose of the method statement is to ensure that:
- The trial is carried in a structured, controlled and safe manner
- The hazards and associated risks are understood and mitigated
While the ultimate goal of the project is to demonstrate Autonomous Valet Parking, we will build up to this demonstration through smaller manageable steps and a separate RAMS will be produced at each stage:
1. Capturing data in car parks
2. Testing in a controlled environment
3. Testing in a covered car park
4. Demonstration
Recent Comments